
このシリーズはフィルムとデジタルそれぞれの強みと弱みを把握した上、適材適所に使い分けることを目的としています。
前回は銀塩とセンサーの特徴を話しました。

今回はダイナミックレンジとラチチュードの話をします。
詳しい解説に入る前に、結論を言います。
ダイナミックレンジはデジタルの勝ち
ダイナミックレンジという概念はカメラセンサーの性能指標です。フィルムでは、これに似ている概念を「ラチチュード」と言います。

一般的な意味で、両方ともどこまで明るい部分と暗い部分を同時におさめるかを規定しています。そういう前提での比較になります。
では、定義から話します。
ダイナミックレンジとは
Wikipediaの定義をそのまま載せると
識別可能な信号の最小値と最大値の比率
Wikipedia
と書いています。
「比率」であることはよくわかりました。「識別可能」はセンサーの場合、露出オーバーしないということです。問題は信号の最小値と最大値です。
カメラセンサーの信号最大値はちょうど露出オーバーにならないレベルの信号の強さです。水筒が満タンな状態をイメージすればわかりやすいです。
数値的には、14bitのRAWファイルなら最大214=16384になります。一部の16bitのRAWを記録できるものをのぞいて、カメラセンサーによって大きいな違いはないです。(実際のダイナミックレンジを計算するときはもっと複雑で、詳しくはこちら)
一方、最小値は残留ノイズです。カメラセンサーだけじゃないですが、あらゆるセンサー類に残留ノイズが発生します。空気中の水分子みたいなもので、水筒の内壁にどうしても付着してしまいます。
最大値が大差がない以上、ダイナミックレンジの決め手は残留ノイズのレベルです。もちろん、低い方がダイナミックレンジが広いです。
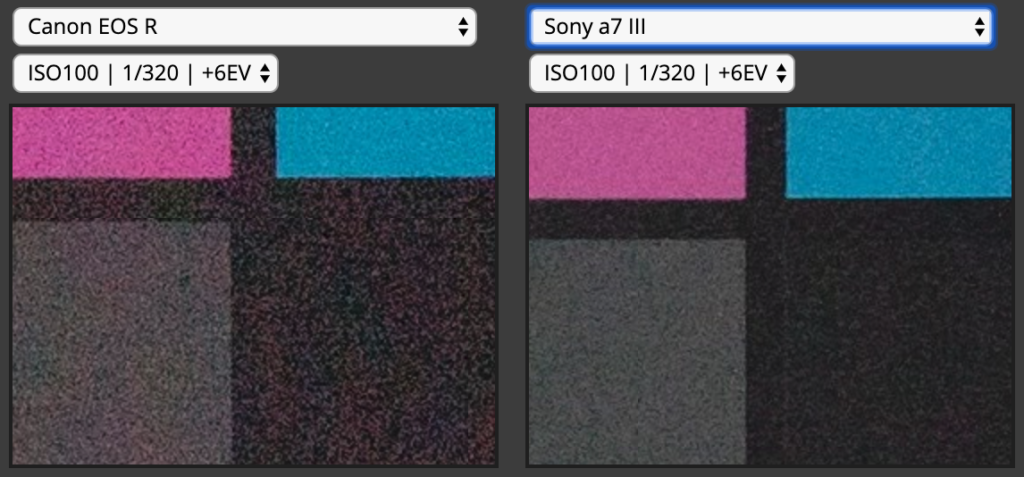
残留ノイズレベルは自分でも確認できます。レンズキャップを取らない状態でシャッターを切って、RAWファイルに記録します。LightRoomとかのソフトで、露出を+5EVくらいにしてみるとわかります。
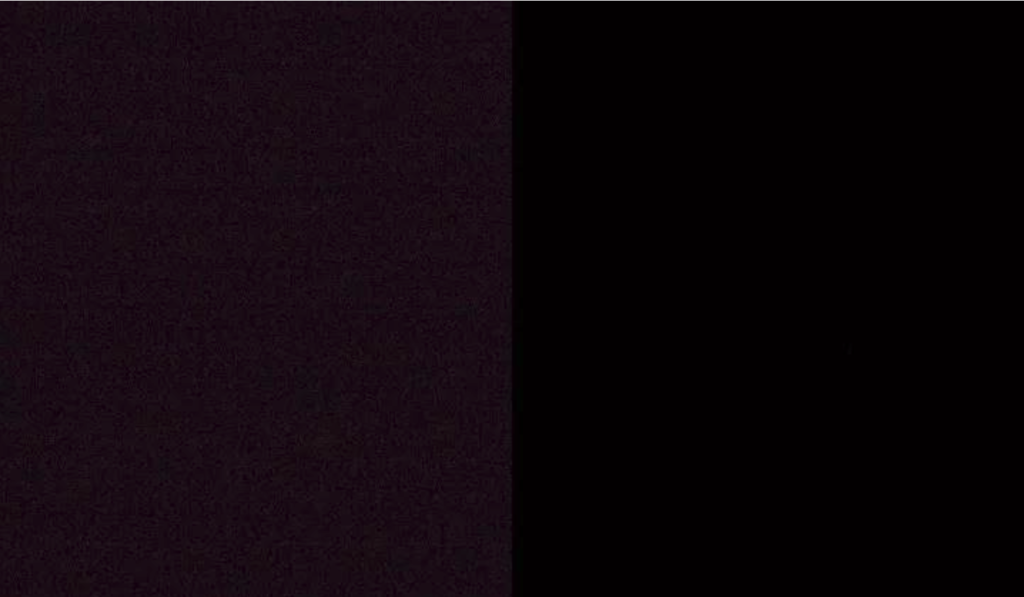
DXOMarkでキャノン製センサーの低いスコアの理由はこれ
今の35mmフルサイズカメラのダイナミックレンジはだいたい14EVです。
経験あるかもしれませんが、すごく露出アンダーなRAWファイルからも実用レベルの暗部ディーテルを復活できます。
ラチチュードとは
Wikipediaの定義を載せます。
感光材料(写真フィルムなど)が、画像(階調の集まり)として再現できる露光の範囲
Wikipedia
露光の範囲は言い換えれば、最小露出と最大露出の差。ダイナミックレンジでいう「信号の最小値と最大値の比率」に相当します。
問題は「再現できる」とは何かです。
それはフィルムの特性曲線(Density Curve)から話をしないといけません。
上のグラフがKODAK ROYAL GOLD 100というカラーネガの特性曲線です。BGRのズレを置いといて、まず横軸と縦軸の意味を理解しましょう。
横軸が対数軸(底が10)の露光量です。単位がlux-seconds、つまりフィルムに一定の時間で照射して得られた露光量です。露出と理解しても問題ないでしょう。
縦軸が現像後の残っている銀塩粒子の密度を表しています。ネガなので、明るいほうが黒い=銀塩粒子の密度が高いです。特性曲線が右上がりなのもそれが原因です。
さて、問題の「再現できる」に戻ります。「再現できる」というのは特性曲線の直線の部分です。
オールクリア!
ラチチュードの定義を書き直すと、
特性曲線の直線部分の露光量の差
になります。つまり下のグラフの丸の部分です。

ラチチュードは露出(EV)に換算できます。横軸の差から0.3を割って計算します。上の例でいくと、差が0-(-2)=2、2/0.3がだいたい7EVになります。
ダイナミックレンジはデジタルの勝ち
今の35mmデジタルカメラは14EVのダイナミックレンジを持っていると言いました。
フィルムはどうでしょう。
ほとんどのカラーネガは7EVしかありません。ネガモノクロフィルムはちょっとましで、9EVのダイナミックレンジを持っています。
リバーサルフィルムの場合はもっとひどく、5EVくらいしかないです。露出をちゃんと計測していないと、簡単にダイナミックレンジからはみ出てしまいます。
Wikipediaもそうですが、載っている情報が古いんです。デジタルカメラはここまで進化したのに、「ラチチュードはフィルムのほうが広い」と言っています。
それはCCDセンサーがまだ主流の時代のときの話です。今のCMOSセンサーは飛躍的な進歩を遂げています。
補足として、カメラセンサーとフィルムを特性曲線ベースで比較した時のグラフも載せておきます。(詳しくはclarkvision)

まとめ
ダイナミックレンジとラチチュードの話をしました。
実際写真を撮影するときは、それぞれの許す範囲内で、適切な露出を考える必要があります。
特にリバーサルフィルムはラチチュードが狭いため、要注意です。
ネガの場合は前回も話したように、ちょっとした露出オーバーには耐えられますが、露出アンダーは絶対避けたほうがいいです。
最後余談ですが、このダイナミックレンジの話はいろんなところでされていて、まったく逆の意見もよく見かけます。
しかし、ダークルームを使って自分で現像処理や増感処理しない以上、露出の調整範囲が非常に狭いです。
私の経験では、仮にスキャナーの多重露出を利用したとしても、広いダイナミックレンジ(仮にあったとしても)は再現できません。
その意味も含めて、ダイナミックレンジはデジタルの勝ちだと言っています。
次回はなぜフィルムの色が気持ちいいかを話します。
では、楽しいカメラライフをお過ごしください!
コメント